Palletising is regularly the last critical process step at the end of the process chain in the industrial production of consumer goods and before their distribution. Competitiveness depends on efficiency and, increasingly, flexibility. The solutions from the specialist transnova-RUF open up huge potential here.
Robot-based solutions have a whole range of technical advantages over conventional layer and gantry palletiser solutions. Industrial robots (in the palletiser sector mostly articulated robots with four, five or six axes) are standard components that have undergone a sophisticated development process and are manufactured as highly available assemblies in a series production process with the highest quality requirements. In addition, they are designed without lubrication points and cable drag chains. Virtually maintenance-free and energy efficient. Movements can be freely programmed very easily via user-friendly HMIs. This allows extreme Degrees of freedom during implementation and later Customisation of pallet sizing images.
Another particular flexibility advantage of robot palletising cells is the Layout flexibility. The movements in the cell can be freely configured by the robot arm so that the requirements of the material flow and the spatial conditions on site can be maximised when planning the layout.

The robot palletising concept from transnova-RUF is characterised by its Strong modularisation from. This allows a very wide range of solutions to be realised for all types of requirements.

Low and medium power range
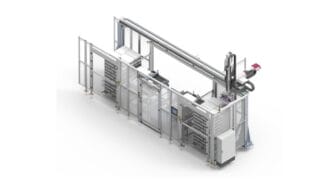
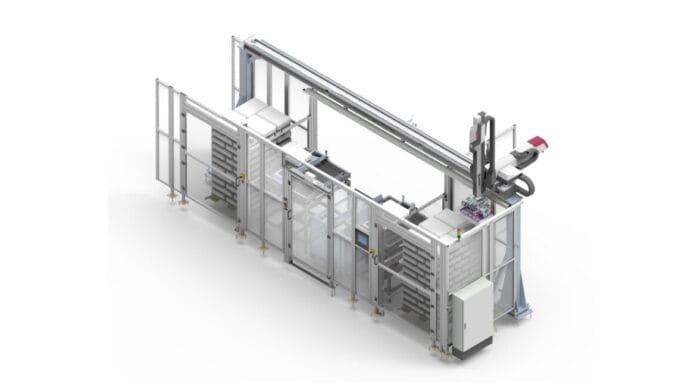
Very economical Single palletising cells with only one decentralised product feed, which is positioned directly behind the end-of-line packaging, represent the entry-level segment. The robot mould can then be designed to be multifunctional. In addition to product handling, the robot can also handle intermediate layers and empty pallets. The layer pads and empty pallets are manually inserted into the robot cell as a stack, for example. The robot then uses sensors on the mould, i.e. ultrasound for height measurement and laser sensors for contour detection, to carry out automated search movements and serves itself from the stack.
If higher production outputs are to be realised, the Pre-grouping and Multiple recording such as row and (partial) layer pre-grouping or pre-stacking of palletised goods, as well as through the separate automation of sub-processes such as empty pallet feeding from a magazine. Increased performance of the robot cells can be achieved.
„In the field of robot technology, we are one of the world's leading manufacturers in the end-of-line packaging sector with over 150 integrated industrial robots per year for maximum flexibility with a small footprint. This is documented by multiple references in the food, pharmaceutical, cosmetics and non-food industries,“ emphasises Michael Ruf, Deputy Managing Director of transnova-RUF Verpackungs- und Palettiertechnik GmbH, Ansbach.
Central palletising concepts
A major step towards increasing the cost-effectiveness of robot palletising systems can be achieved with Central palletising concepts for several lines can be achieved. When adding a second line for robot palletising, additional costs of around 30 percent can be expected compared to 100 percent for a conventional layer palletiser solution. This means that up to four, and under certain circumstances even up to seven, lines can be processed with just one robot. Through the use of Linear traversing axes For the robot, the scope can even be extended again.

Tool strategy
A key factor influencing success is the Correct tool strategy. Absorbent products can be handled with a mechanically very simple vacuum suction pad. An energy-saving alternative is to grip the products using a parallel gripper. The aim here is to grip the packs securely but not to deform or damage them. Various factors such as fill level, pack density or weight influence the gripping force. Gripping pressure, which in the standard gripper from transnova-RUF has a Proportional pressure control valve is controlled. The different pressures are then used as recipe parameters in the Format database managed by the system control. If the products are neither suctionable nor clampable, then undergripping using a fork gripper is an option. Push-off, hold-down and centring plates support reliable palletising, for example when using stacking flaps on the cartons. There are also special grippers such as layer suction pads or magnetic grippers.

What for whom?
With this portfolio of tools, you can all conceivable palletised goods (cartons, trays, E2 crates, sacks, buckets, etc.) can be handled. With compact combination tools, even cartons, bags, buckets, empty pallets and layer pads can be handled simultaneously. This allows All common pallet formats and also Special pallets be processed.
To support the operators, transnova-RUF has developed the SIMPLO software tool has been developed. This makes it possible to use a conventional PC without programming knowledge within a few minutes New palletising scheme to generate. Simply enter the dimensions of the palletised goods and pallet data such as pallet format, maximum block size or position of the intermediate layers. The programme calculates all conceivable palletising schemes as suggestions. After the selection decision, the corresponding scheme is transformed into robot movement commands, which are transmitted to the robot controller as a new format data record. In this way, transnova-RUF systems are operated with far more than 100 formats created independently by the customer.
[infotext icon]Ansbach-based transnova-RUF GmbH develops and builds machines for the automation of end-of-line packaging and palletising processes. From individual compact machines for top and side loading to picker systems for fast pick & place applications and robotic systems for picking, palletising and depalletising tasks through to complete end-of-line packaging lines, the company offers customised „design-to-order“ solutions based on a modular system.