Mit ABB-Deltarobotern automatisiert die Fleischindustrie das Sortieren und Verpacken. So zum Beispiel bei Jack Link’s für BiFi-Snacks.
Was früher per Hand geschah, hat ABB für Jack Link’s automatisiert. Der beliebte BiFi-Snack wird mit ABB-Deltarobotern automatisiert sortiert und verpackt, denn nach der Süßwarenindustrie arbeitet auch die Fleischindustrie an der Automatisierung der Fertigungs- und Verpackungsprozesse.
Bis zur Jahrtausendwende erfolgten in der Fleischindustrie viele Sortierprozesse noch in Handarbeit. Auch beim BiFi-Hersteller Jack Link’s sortierten noch Anfang der 2000er Jahre die Mitarbeitenden die BiFi-Würstchen an der Linie manuell und legten diese in die Mulden der Tiefziehmaschine ein. Daher stellte die Inbetriebnahme der Roboter-Sortierungsanlage im Jahr 2006 einen Vorstoß der Automatisierung in neue hygienische Anwendungsbereiche dar.
Wie lassen sich BiFi-Würstchen automatisiert möglichst effizient greifen und verpacken? Vor diesem Hintergrund wurde das damals junge Unternehmen Robomotion damit beauftragt, eine passende Roboterzelle für die BiFi- Verpackungsanlage zu konzipieren. Damals beschäftigte sich das Stuttgarter Startup mit den drei Gründern Steffen Mayer, Jan Binder und Dr. Andreas Wolf mit der Roboterintegration an Serienmaschinen in der Fleischindustrie. Bald stellte sich heraus: Das technologische Prinzip, Produkte mithilfe von Bildverarbeitung, Steuerungstechnologie, Sensorik und ausgeklügelter Greifertechnik nach bestimmten Kriterien schnell zu greifen, war auch für Applikationen in der Lebensmittelindustrie von großem Interesse.
(Bild: ABB)
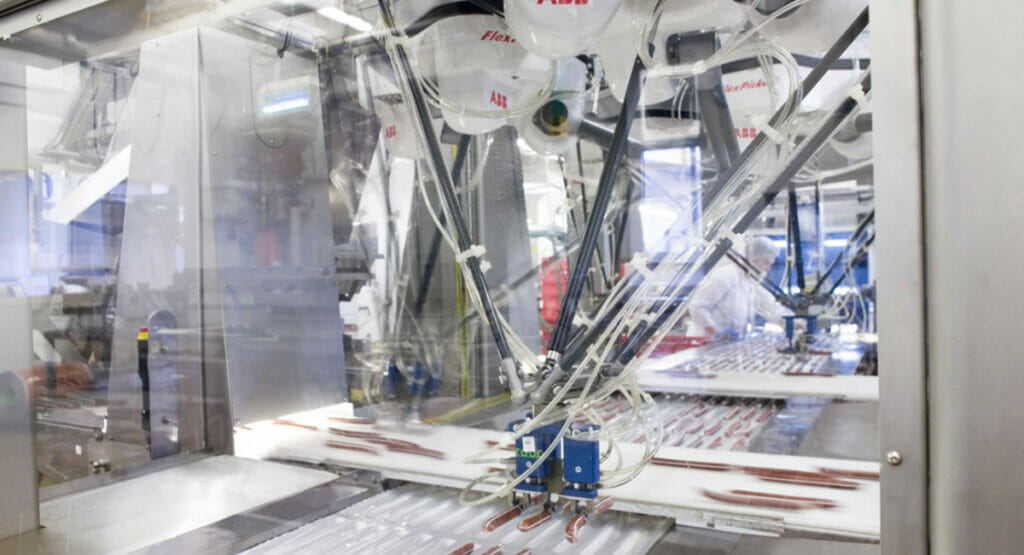
Im Rahmen einer Kooperation stellte ABB dem Startup einen Deltaroboter des Typs IRB 340 FlexPicker zur Verfügung. Aufgrund ihrer Parallelkinematiken sind Roboter dieses Typs für Handling-Aufgaben mit einem hohen Anspruch an Schnelligkeit und Präzision geeignet, beispielsweise von einem Förderband in eine Verpackungsmaschine. Mit den ABB-Robotern als Herzstück sollte Robomotion in seiner Rolle als Systemintegrator eine Roboteranlage entwickeln und validieren. Mittels Vorversuche im Labor konnte demonstriert werden, dass die ABB-Roboter in der Lage waren, bis zu 150 BiFi-Würstchen in der Minute prozesssicher mit mechanischen Greifern dem Tiefziehverpackungsprozess zuzuführen. ABB wiederum übernahm die Verantwortung für Service und Wartung der Roboteranlage im Betrieb.
(Bild: ABB)
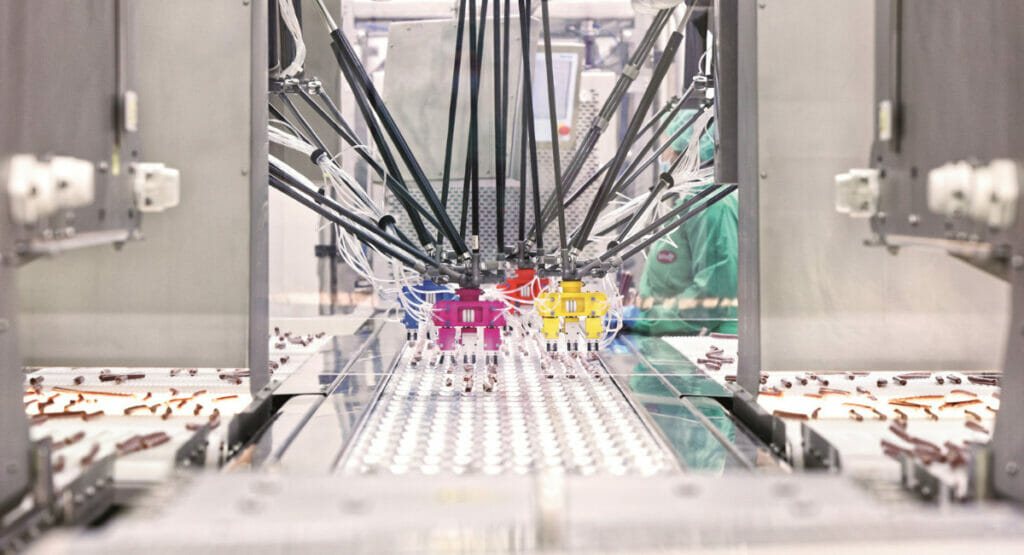
Nach einer erfolgreichen Testphase wurden in der ersten Anlage insgesamt vier IRB 340 FlexPicker von ABB installiert. Mithilfe der angeschlossenen Zuführtechnik werden die BiFi-Würstchen auf Vibrationsstrecken von Robomotion platziert und durch vier FlexPicker zum Einschweißen in die Mulden in der vorbereiteten Tiefziehfolie verteilt. Entlang der Förderstrecke installierte Kameras kontrollieren nicht nur die Qualität, sondern analysieren auch die Lage und Position der Würstchen.
Auf Basis dieser Informationen wissen die Roboter dank der ABB-Software PickMaster für kameragestützte Pick- und Verpackungsanwendungen genau, wie sie die Würstchen „anzupacken“ haben. Dahinter steckt ein Bildverarbeitungssystem, das in der Lage ist, die Würstchen trotz unterschiedlicher Krümmung auch als solche zu erkennen. Zum Zweck der Effizienz muss der Roboter nicht nur ein, sondern drei Würstchen auf einmal greifen. Um diese Präzision bei gleichzeitiger Prozesssicherheit zu gewährleisten, ist das Öffnen und Schließen der Greifer auf die Millisekunde genau getaktet.
„Die Automatisierungslösungen, die wir in Zusammenarbeit mit Robomotion und ABB in den zurückliegenden Jahren umsetzen konnten, haben unsere Erwartungen voll erfüllt. Die Anlagen sind zuverlässig und wartungsarm und bieten eine hohe Verfügbarkeit. Dies wirkt sich auch positiv auf die Gesamtbetriebskosten aus.“
Alfred Gehr, Betriebsleiter bei Jack Link’s
(Bild: ABB)
Die erfolgreiche Inbetriebnahme der ersten Roboteranlage in der BiFi-Produktion war erst der Beginn eines fortlaufenden Forschungs- und Optimierungsprozesses. So entwickelte das Team im Rahmen des BiFi-Projekts gemeinsam mit dem Fraunhofer IPA beispielsweise einen 3D-gedruckten Greifer für die Roboter, um Gewicht einzusparen und dadurch den Handling-Prozess noch effizienter zu gestalten. Seit 2009 stammen die Dreifach-Greifer, die in der Produktion eingesetzt werden, aus dem 3D-Drucker.
Über die Jahre ist das Sortiment an Fleischsnacks bei Jack Link’s spürbar gewachsen. Die verschiedenen BiFi-Sorten unterscheiden sich nicht nur in der Zusammensetzung, sondern teilweise auch in der Größe und Form. Für die flexiblen ABB-Roboter, ausgestattet mit der PickMaster-Software, ist dies kein Problem: Durch kleine Anpassungen des Programms und der Bildverarbeitungssoftware sind sie in der Lage, sich auf Produktvarianten einzustellen. Lediglich an der Verpackungsmaschine selbst muss ein Werkzeugwechsel vorgenommen werden.
(Bild: ABB)
Wenn die Würstchen sortiert und mit einer Tiefziehfolie versehen sind, wird die Außenverpackung anschließend verschweißt, und die Würstchen wandern in Kartons. Dazu gruppiert ein FlexPicker-Roboter von ABB die fertig verschweißten Würstchen auf einem Fließband zu einer Formation, die ein zweiter, mit passenden Greifern ausgestatteter Roboter, aufnimmt und gruppenweise auf Kartons verteilt. Da sich die Kartons für die unterschiedlichen BiFi-Produkte in ihrer Größe unterscheiden, ist die Flexibilität der Roboter beim Einsortieren gefragt. Mit einem schnellen Greiferwechsel und einer Anpassung der Robotersoftware lässt sich die Anlage auf ein neues Produkt anpassen. Auch die Sekundärverpackungsanlage ist das Produkt der bewährten Kooperation zwischen ABB Robotics und Robomotion.
Co-Packer Variopack erhöht die Effizienz seiner Qualitätsprozesse durch den Einsatz der automatisierten Druckbildkontrolle von EyeC. Eine schnelle Integration und verbesserte Fehlererkennung stehen im Mittelpunkt.
In Freiburg zeigt Tomra Reuse, wie die automatisierte Rückgabe von Recup Mehrwegbechern in bestehende städtische Systeme integriert werden kann. Zwei neue Automaten am Hauptbahnhof bieten eine praktische Lösung.
Multivac zeigte auf der Interpack, wie Smart Packaging-Lösungen Effizienz und Nachhaltigkeit in der Verpackungsindustrie steigern können. Mit Fokus auf Automatisierung und Digitalisierung präsentierte das Unternehmen zukunftsweisende Technologien.